INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
New Internal Guider Features
- Hy Murveit
-
 Topic Author
Topic Author
- Offline
- Administrator
-

- Posts: 1234
- Thank you received: 571
New Internal Guider Features was created by Hy Murveit
First off, I know many people are happy with the current performance, so as the default, nothing should change algorithmically. You should get the same guiding performance as before.
Changes:
SEP MultiStar: This is a new guide-star detection, tracking & drift computation algorithm.
You can select this in the Guide options menu (click Options... in the lower right corner of the Guide tab), and then click on "Guide", and then choose from the "algorithm" menu. There you choose the guide-star detector. (e.g. there choices include Smart, SEP, Fast, ...). Try SEP MultiStar. I believe it is more stable in all three respects (guide star selection, detection and drift calculation). You may not notice much difference in a normal guiding session when things are going well, except, perhaps, better choice of a guide star.
GPG RA Guiding: New control algorithm for RA guiding.
I added a new guiding algorithm. This is for RA only--that is, guiding for DEC still happens, but using the existing guiding algorithms. This guider is based on the work in this PhD thesis www.research-collection.ethz.ch/handle/20.500.11850/129665 and is the same as the well-regarded Phd2 guide algorithm known as Predictive PEC. You will see Copyright 2014-2017 Max Planck Society, now in the KStars credits for this system. It estimates the periodic error in the guiding system, and tries to "fix it before it happens". This system should perform about the same as the standard guider for the first period or two of your mount's periodic error, then improve. When using this system, it's best to set in advance what your mount's worm-gear period is (e.g see github.com/OpenPHDGuiding/phd2/wiki/Mount-Worm-Period-Info). I know my Orion Atlas pro is about 480s. You enable this in the Guide options menu, in the GPG RA tab, and then checking "Enable GPG". There are other parameters you can change, but as indicated earlier, the main one to think about is "Major Period".
Graphics: I modified the drift graph on the guider tab in several ways.
(1) Added a guide-star SNR plot. This can be useful, e.g. when the SNR starts taking a dive, you know things aren't going well, perhaps a cloud is passing by.
(2) Added a plot of the RMS error (i.e. RA and/or DEC arc-second error RMS-averaged over the past 50 guiding samples).
(3) Separated the zooming for x and y axes. You can use '+' and '-' buttons below the x-axis to change the time scale of the plot (number of minutes plotted), and you can use the mouse scroll (same as before) to zoom in/out of the Y-axis. When you mouse-over the plot, you can see all the values for the different graphs.
BTW, in case you didn't know (this isn't something I changed), you can change the amount of space allocated to the drift plot (the circle) and the drift graph by placing your mouse over the short dotted line between them and dragging left of right.
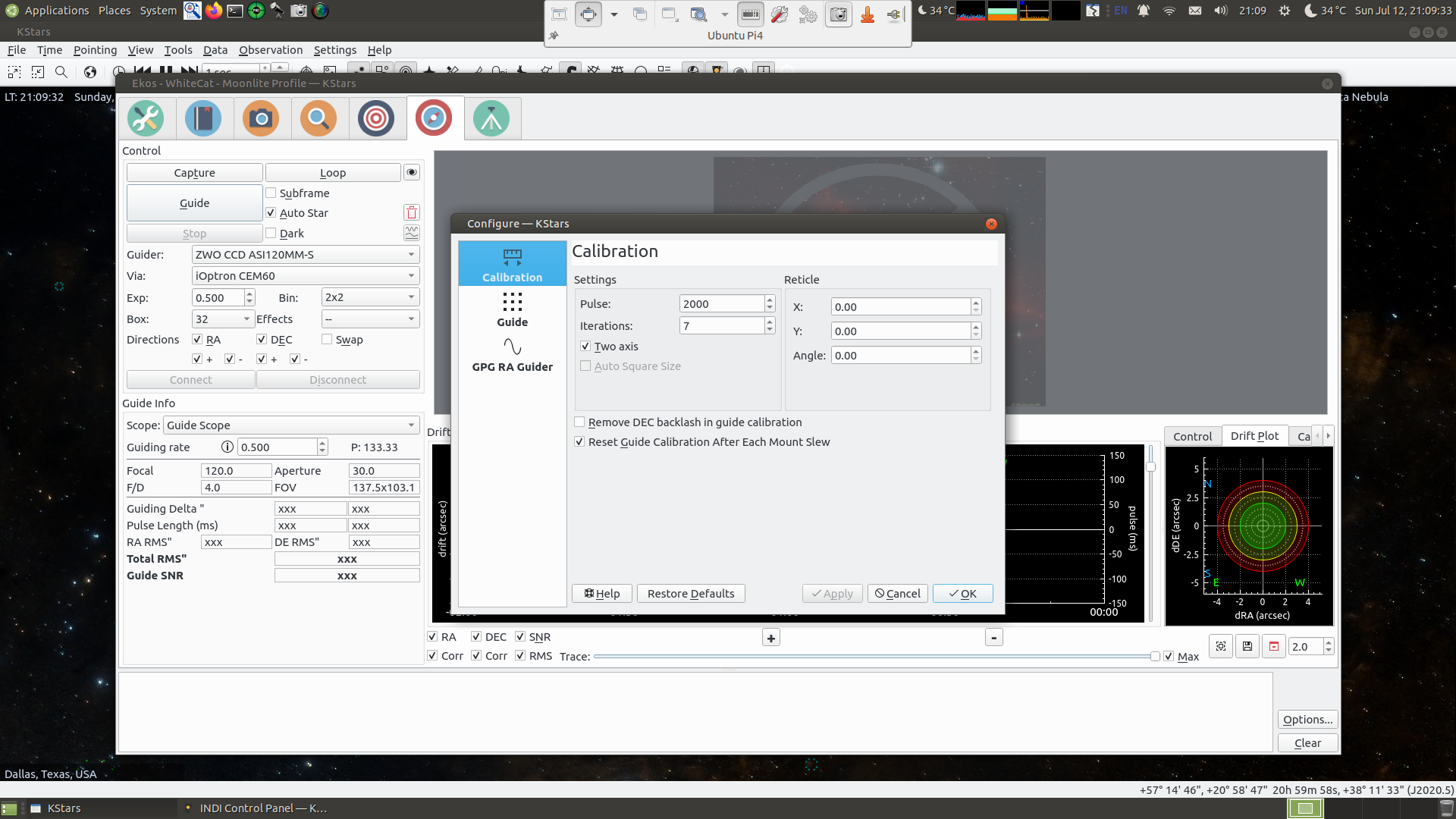
Calibration: I added a backlash removal section to the "calibration dance". Before it starts calibrating DEC, the Ekos guider will now take 5 DEC steps, without measurement, to make sure there's no backlash in the DEC gears. This should improve the quality of the calibration, however, if you don't like this, you can remove it by unchecking "Remove DEC backlash in guide calibration" in the Guide options menu, in the "Calibration" tab there.
Calibration Plot and Log viewing: A month ago I made a few other changes I wanted to remind you about, described in this thread: indilib.org/forum/general/7076-new-inter...der-tools.html#54829 Very briefly, I added a calibration plot and a way to use phdlogview for EKos internal guiding. Please let me know if you have any feedback on those as well.
Hy
PS What's next? I cleared most of my "Guider TODO list", but there's one other thing bugging me. I believe that we should not need to re-calibrate every time we start guiding. In fact, a well-done old calibration is probably better than a recent one that's noisier (as long as the camera angle hasn't rotated). I will likely look into saving and restoring calibrations, and/or on-line calibration, where the guider adapts as it goes.
Please Log in or Create an account to join the conversation.

Replied by alacant on topic New Internal Guider Features
Thanks for the work.
I use ppec with my eq6 under PHD2 but with a fixed period of 122s.
Question: is it possible to use a fixed value with your new implementation?
Thanks again and clear skies,
Steve
Please Log in or Create an account to join the conversation.
- Chris Rowland
-

- Offline
- Platinum Member
-

- Posts: 554
- Thank you received: 138
Replied by Chris Rowland on topic New Internal Guider Features
Make the corrections aware of the declination so if the declination changes the guide correction changes.
Make the corrections aware of the pier side. This would change the corrections depending on the pier side.
The second is more of a problem because exactly what happens depends on the mount and how it implements corections.
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Offline
- Administrator
-
- Posts: 1234
- Thank you received: 571
Replied by Hy Murveit on topic New Internal Guider Features
This is a view of the GPG options page (stretched a little so you can see anything)
photos.app.goo.gl/R6MoXRqsM9i8uqVE9
Just set "Major Period" to the period you want (122s) and uncheck "Estimate Period" so it doesn't re-estimate that.
With respect to the guiding algorithm, you should get about the same RA guiding with Ekos using GPG as with Phd2 using PPEC.
You should be able to set the same parameters. (Of course the systems will differ in their guide-star detection, tracking, calibration, ...).
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Offline
- Administrator
-
- Posts: 1234
- Thank you received: 571
Replied by Hy Murveit on topic New Internal Guider Features
Please let me know exactly what you mean by "change the correction" and I can look into it.
FWIW, my ideas about adaptive calibration would probably cover those issues, though it might take a while to adapt.
In my experience, though, unless you're very close to the pole, the guiding angles (and the approximation that the RA
and DEC directions are perpendicular in the image) suffice, especially given the seeing noise.
Hy
Please Log in or Create an account to join the conversation.
Replied by alacant on topic New Internal Guider Features
Hi hy and thanks for your reply. I tried it and it worked fine:)
Question: what other stuff needs to be changed in the configuration to make the switch from PHD2 to GPG?
e.g. Does the internal guider look after meridian flip or change in declination between targets?
With PHD2 I make one calibration and use it over and over. Is that the case with the internal guider?
TIA,
Steve
-
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Offline
- Administrator
-
- Posts: 1234
- Thank you received: 571
Replied by Hy Murveit on topic New Internal Guider Features
Rendering Error in layout Message/Item: array_keys(): Argument #1 ($array) must be of type array, null given. Please enable debug mode for more information.
Please Log in or Create an account to join the conversation.
Replied by alacant on topic New Internal Guider Features
Yeah, I'll test it. Do you have a git branch/fork or whatever it's called?
Cheers
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Offline
- Administrator
-
- Posts: 1234
- Thank you received: 571
Replied by Hy Murveit on topic New Internal Guider Features
Hy
Please Log in or Create an account to join the conversation.
- Jose Corazon
-

- Offline
- Supernova Explorer
-
- Posts: 1119
- Thank you received: 182
Replied by Jose Corazon on topic New Internal Guider Features
The multistar guide algorithm works great, I have been testing it for a little over a week now. However, I just realized that I had not turned on the PEC option, so will do that now (that box was off by default).
As for the recalibration option: I have been a big promoter of that one. I agree with you that it is probably not necessary when you are using a good mounts, but with a lower end mount I find that it is an indispenaible option to have.
Currently, there is the option in the guide module to just turn that option - recalibrate when the mount slews - off (or on). It would be great to keep that.
I do not use it on my EQMOD mount, for the reasons Hy stated, but on my low end (highly portable, that's why I love/hate it) iOptron SmartEQPro+ mount it is an essential option. The periodic error on that mount is just too great, so if there is the additional error resulting from a variation in the angle upon declination change, it may just kill the session.
That being said, I am still wondering whether the problem I am having with my iOptron SmartEQPro+ mount lies in the iOptron telescope driver. I am seriously thinking about getting a CEM25P instead (sole reason is the much lower weight of the iOptron mounts), but would very much like to see the guide logs on those. So if anyone has such a mount, please post or send me a few representative guide logs that I can analyze.
Thanks to you all and, of course, especially to Hy for improving the internal guider tremendously!
Jo
PS: Here an image I just processed (preliminary) of NGC700, taken over the course of the last week exclusively using Hy's new algorithm on the iOptron Smart EQ mount and a WO WhiteCat (250 mm FL) telescope, using the ZWO HOS filter set and the ZWO 1600MM Pro. Despite the inherent periodic error of the mount, the guiding really pulled that target out of the dumpster, so to speak.

Please Log in or Create an account to join the conversation.
- Andrew Burwell
-

- Offline
- Platinum Member
-
- Posts: 527
- Thank you received: 139
Replied by Andrew Burwell on topic New Internal Guider Features
So I often guide, even though it can make things worse with a 10Micron that doesn’t need correction. Just some extra info to help make an informed decision on recalibration.
Thanks for your work, I will definitely give multi-star a try. Will multi star eliminate the effects of seeing possibly? Does it average out the movement of all the stars?
Please Log in or Create an account to join the conversation.
- Jose Corazon
-
- Offline
- Supernova Explorer
-
- Posts: 1119
- Thank you received: 182
Replied by Jose Corazon on topic New Internal Guider Features
When you say that 'recalibration is giving you problems', did you have the box in the guide module that allows you to activate the option to recalibrate after the mount slews checked or unchecked?
You should be able to just uncheck it and then there would be no recalibration.
Please Log in or Create an account to join the conversation.