Astrophysics Legacy
Installation
sudo apt-add-repository ppa:mutlaqja/ppa sudo apt-get update && sudo apt-get install libindi
Features
This driver supports older Astro-Physics mounts (GTOCP2 or before). It can work for later mount models, but for such models, it's better to use other drivers with more functionality.
Current features of the driver:
- Goto/Slew
- Sidereal, lunar, solar and custom track rates
- Custom parking positions
- Pulse-guiding
- Full joystick support
Operation
First Time
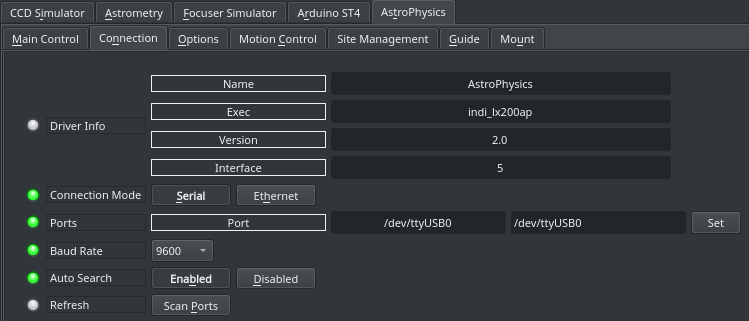
When using the driver for the first time, ensure to set the correct port under the Connections tab. The primary and secondary telescope (if exists) aperture and focal lengths must also be set in the Options tab. If you do not have a secondary telescope, just put the same numbers as the primary there and click Set.
It is also necessary to set the geographic location and park position in the Site Management tab.
Do not try parking the mount until this position is defined!
Use a park azimuth of "0" and a park altitude equal to your latitude.
The "Default" button should pre-populate these fields with the proper values based on the geographic location you have specified.
Be sure to save these options using the "Save" button on the Options tab or else the changes will be loss when the driver is closed.
Initialization
On connection, the mount must be initialized to set values for the date, time, location, etc.
There are two types of initialization:
- COLD
- WARM
When connected to the mount for the first time after powering on the mount use the COLD initialization option.
Use a WARM initialization if connecting to a mount which has already been initialized once using the COLD initialization and has NOT been powered down.
The mount will assume it is starting in the PARK3 park orientation - this is with the scope pointing at the pole and the counterweight straight down.
These are defined in this document from Astro-Physics: PARK POSITIONS
You must put the scope in this position when connecting to the mount!
Operation
Main Control
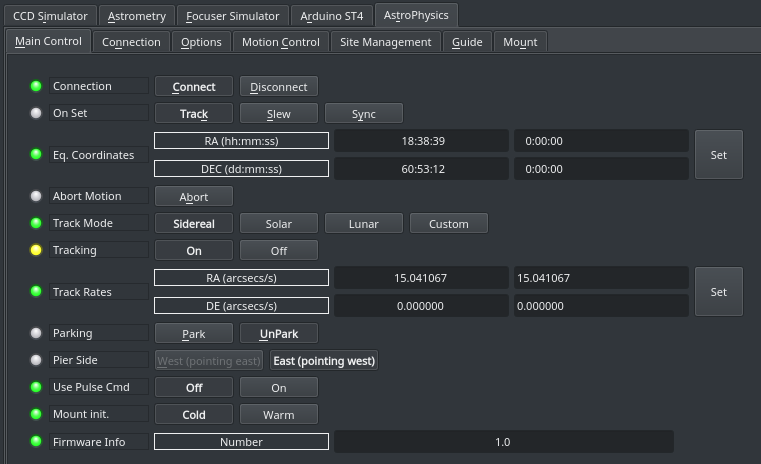
The main control tab is where the primary control takes place.
To track an object, enter the equatorial of date (JNow) coordinates and press Set. The mount shall then slew to an object and once it arrives at the target location, it should engage tracking at the selected tracking rate which default to Sidereal tracking. Slew mode is different from track mode in that it does not engage tracking when slew is complete. To sync, the mount must be already tracking. First change mode to Sync, then enter the desired coordinates then press Set. Users will seldom use this interface directly since many clients (e.g. KStars) can slew and sync the mount directly from the sky map without having to enter any coordinates manually.
The Abort Motion button can be used to stop the mount at any time.
Four tracking modes are supported: Sidereal, Solar, Lunar, and Custom. When using Custom mode, the rates defined in Track Rates shall be used.
Tracking can be enganged and disenganged by toggling the Tracking property.
Mount parking and unparking is controlled by the Parking property.
The Use Pulse Cmd property can be enabled to guide the mount through the communications interface and eliminates the requirement of using an ST-4 cable to guide the mount.
The Firmware property shows the detected firmware version of the mount controller.
Options
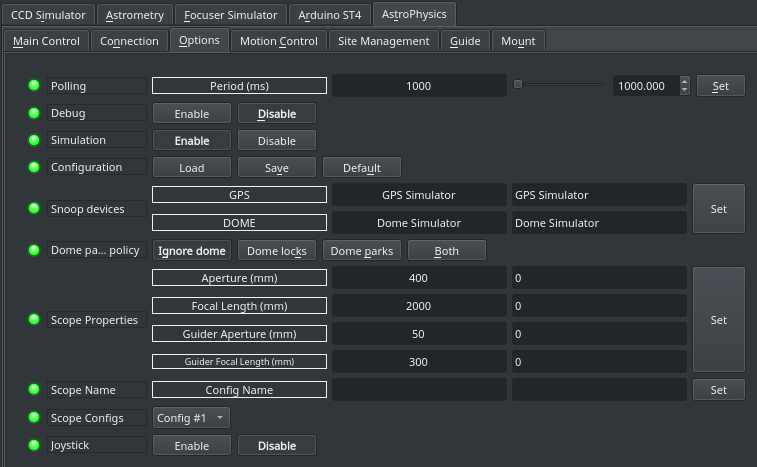
The Options tab is used to set debugging and other configuration options, as well as being able to load and save configurations.
- Debug: Enable debug logging where verbose messaged can be logged either directly in the client or a file. If Debug is enabled, advanced properties are created to select how to direct debug output. Watch a video on how to submit logs.
- Simulation: Enable to disable simulation mode for testing purposes.
- Configuration: Load or Save the driver settings to a file. Click default to restore default settings that were shipped with the driver.
- Snoop Devices: Indicate which devices the driver should communicate with:
- GPS: If using a GPS driver (e.g. INDI GPSD) then enter its name here. EQMod shall sync its time and location settings from the GPS driver.
- Dome: If using a Dome driver, put its name here so that Dome Parking Policy can be applied.
-
Dome Parking Policy
If a dome is used in conjunction with the mount, a policy can be set if parking the mount or dome can interfere with the safety of either. For example, you might want to always park the mount before parking the dome, or vice versa. The default policy is to ignore the dome.
- Ignore dome: Take no action when dome parks or unparks.
- Dome locks: Prevent the mount from unparking when dome is parked.
- Dome parks: Park the mount if dome starts parking. This will disable the locking for dome parking, EVEN IF MOUNT PARKING FAILS.
- Both: Dome locks & Dome parks policies are applied.
- Scope Properties: Enter the Primary and Seconday scope information. Up to six different configurations for Primary and Secondary Guider telescopes can be saved separately, each with an optional unique label in Scope Name property.
- Scope Config: Select the active scope configuration.
- Joystick: Enable or Disable joystick support. An INDI Joystick driver must be running for this function to work. For more details, check the INDI Telescope Joystick tutorial.
Motion Control
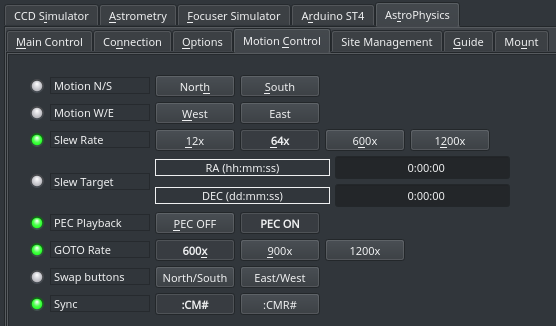
Under motion control, manual motion controls along with speed and guide controls are configured.
- Motion N/S/W/E: Directional manual motion control. Press the button to start the movement and release the button to stop.
- Slew Rate: Rate of manual motion control above when 1x equals sidereal rate.
- PEC Playback: Controls whether PEC correction are enabled.
- GOTO Rate: Rate of motion for GOTO operations.
- Swap Buttons: Reverse direction mount moves.
- Sync: Controls whether SYNC or RECAL is used for syncs. The recommended setting is :CMR# to use RECAL!
Site Management
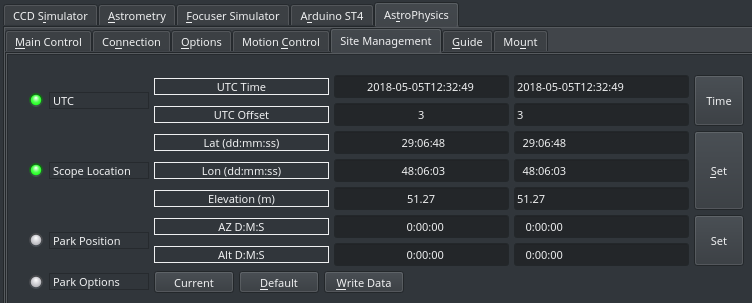
Time, Location, and Park settings are configured in the Site Management tab.
- UTC: UTC time and offsets must be set for proper operation of the driver upon connection. The UTC offset is in hours. East is positive and west is negative.
- Location: Latitude and Longitude must be set for proper operation of the driver upon connection. The longitude range is 0 to 360 degrees increasing eastward from Greenwich.
- Parking: By default, the parking position is when the OTA to be looking directly at the celestial pole. To restore parking position to the default value, please Default under Park option. You can set a custom parking position using two methods. The mount must be unparked before you can set a new position:
- Enter the desired AZ & ALT values for the custom parking position, then press Set and then press Write Data to save the new parking position.
- Slew the mount to the desired parking position, then press Current to sync the encoders position to this value, and then Write Data to save.
- Enter the desired AZ & ALT values for the custom parking position, then press Set and then press Write Data to save the new parking position.
You can park the telescope by clicking on Park on the Main Control tab. If the telescope is already parked, click the park button to unpark it. You cannot perform any motion unless the telescope is first unparked!
Guide
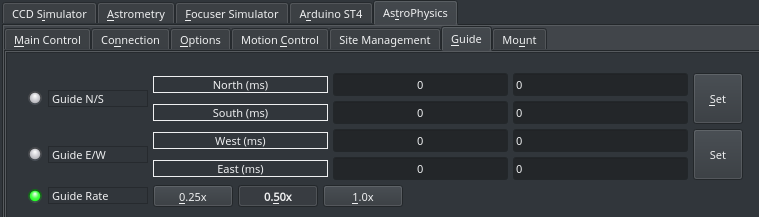
Guide related option:
- Guide N/S/W/E: Guiding pulses durations in milliseconds. This property is meant for guider application (e.g. PHD2) and not intended to be used directly.
- Guide Rate: Guiding Rate for RA & DE. Example: 0.25 means the mount shall move at 25% of the sidereal rate when the pulse is active. The sideral rate is ~15.04 arcseconds per second. So at 0.25x, the mount shall move 0.25*15.04 = 3.76 arcsecond per second. When receving a pulse for 1000ms, the total theoritical motion 3.76 arcseconds. The recommended value is 1.0x.
Mount

Slew Accuracy: Since legacry driver cannot know from the controller when the slew operation completed successfully, the driver employs another approach to determine when the slew is complete. By default, the drivers calculates the difference between the current mount position versus the target position. When the difference is within the Slew Accuracy threshold (default 3 arcminutes), it considers the slew to be complete. It is recommended to leave the value as-is.
Issues
- When you park the mount it is recommended to disconnect the driver from the mount and power the mount down as well before connecting again.
If you find a bug, please report it at INDI's bug tracking system at GitHub.

{kind=link}